RC Helicopter Flybarless Controller G474-HLITE
STM32G474, ICM42688P, SPL06L, 5V BEC, 3.5xUarts, Rotorflight firmware

Gallery
Specifications, Tips
Specifications
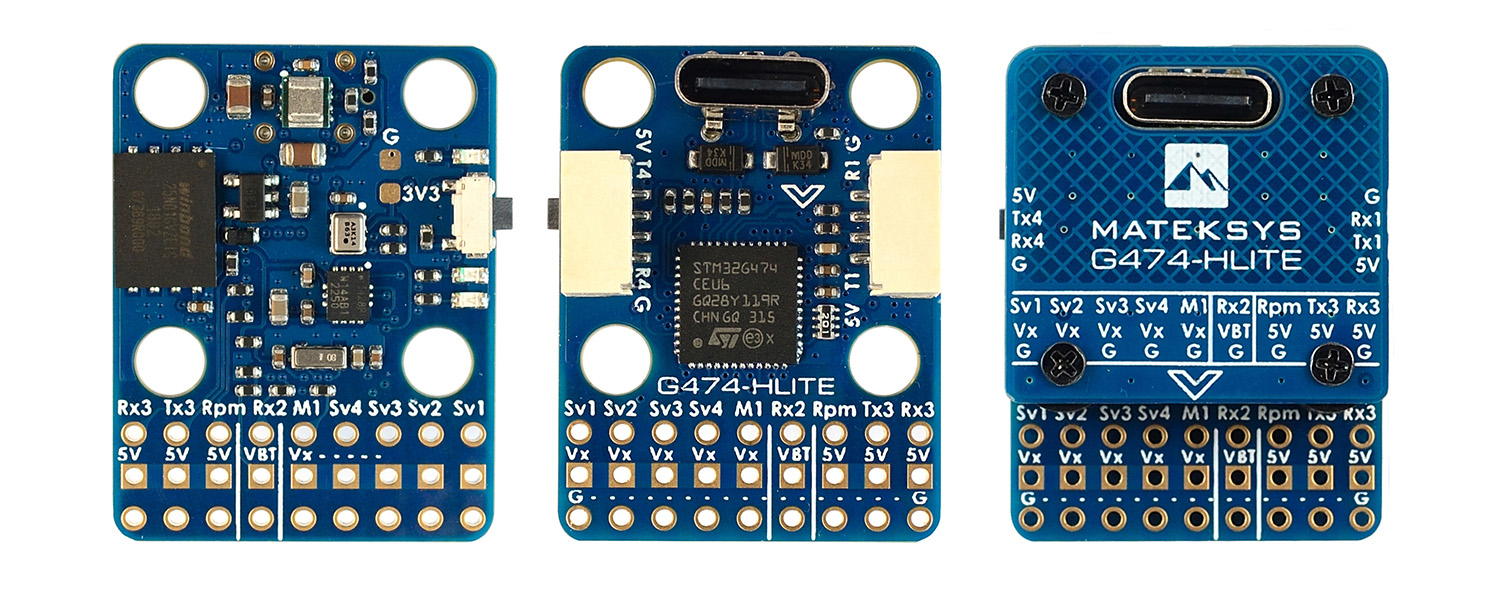
- MCU: STM32G474CE, 170MHz Cortex-M4 , 512KB Flash
- IMU: ICM42688-P
- Baro: SPL06
- Blackbox: 128MB Flash (1G-bit NAND)
- 3.5x UARTs (full UART1/UART3/UART4, and UART2_Rx)
- 6x PWM (4x Servos, 1x Motors, RPM)
- 1x ADC (VBAT sense)
- No I2C pad breakout
- USB Type-C(USB2.0)
Electrical characteristics
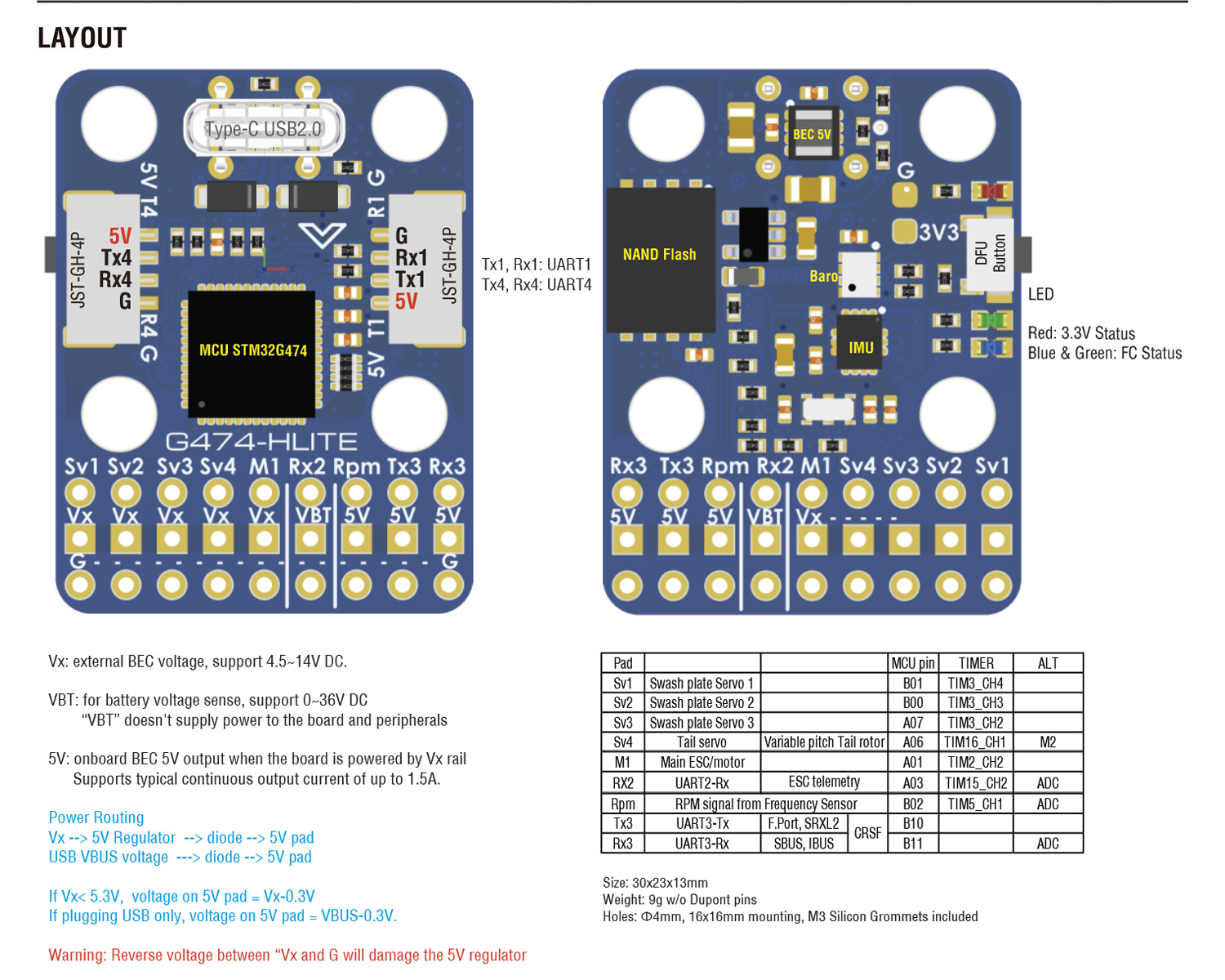
- Input voltage range: 4.5V~14V on “Vx” pad
- BEC 5V 1.5A output for FC components and peripherals
- Battery Voltage divider 1K:10K (Scale 110)
- Static power: 60mA@5V
- No current sensor integrated.
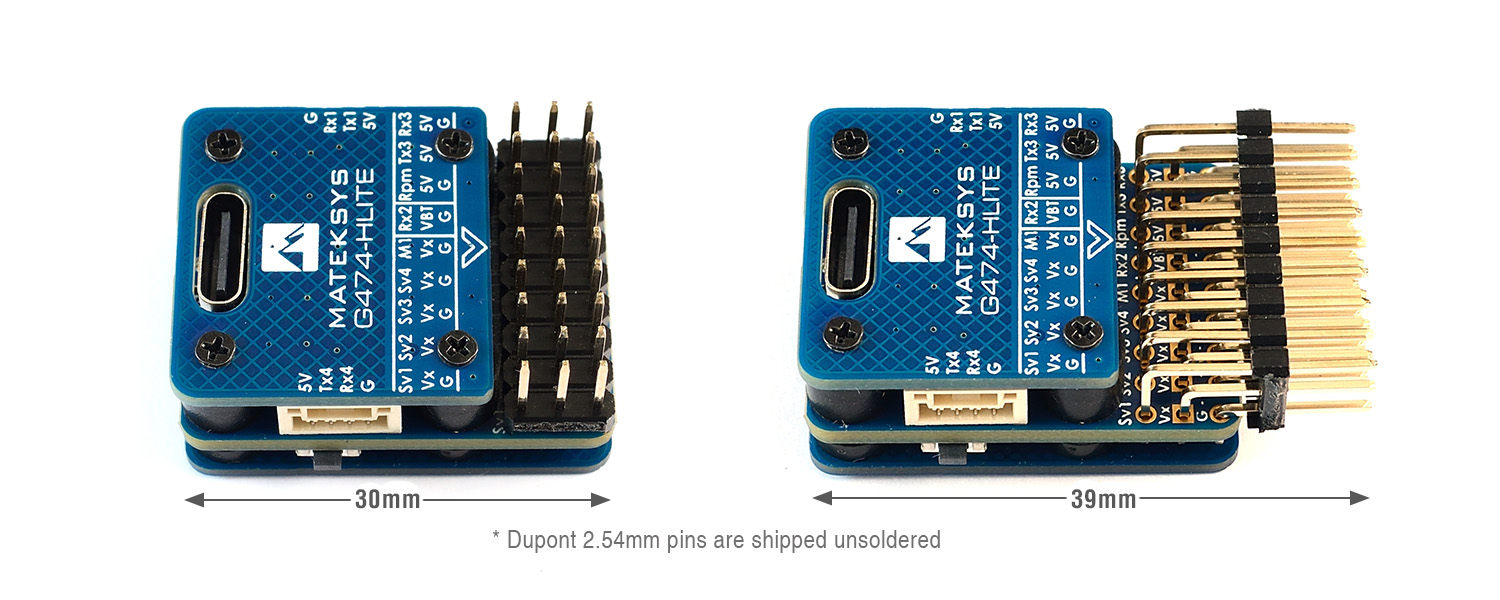
Physical
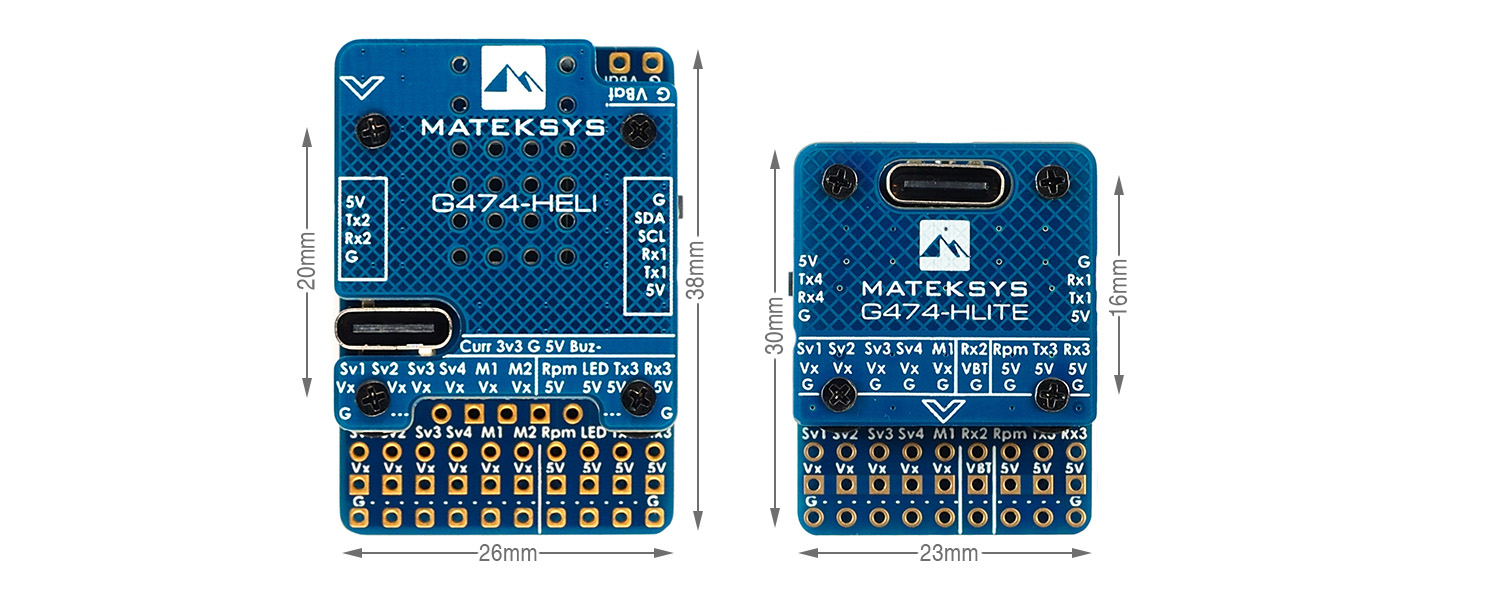
- Dimensions: 30 x 23 x H13 mm
- Mounting: 16 x 16mm, Φ4mm with Grommets Φ3mm
- Weight: 9g (w/o pins)
- 3D step file
Including
- 1x G474-HLITE
- 2x 20cm JST-GH-4P to JST-GH-4P cable
- Dupont 2.54 pins (Board is shipped unsoldered)
Flahing firmware /config
- Rotorflight / MATEKG474HELI
- Rotorflight configurator 2.x https://github.com/rotorflight/rotorflight-configurator/releases
- Rotorflight Wiki https://github.com/rotorflight/rotorflight/wiki
- [Firmware preloaded in factory] rotorflight_4.3.0_rc2.
- [Flashing with latest RF2 fw] Select “MATEKG474HELI” target in Rotorflight configurator –> Load firmware (online) –> Flash firmware.
- [Flashing with latest RF2 fw] Select “STM32G47X” target in Rotorflight configurator –> Load firmware (online) –> Flash firmware. After flashing and G474-HELI rebooting, connect G474-HELI to RF configurator, go into CLI mode, copy and paste all config lines into CLI, type “save”, press ENTER.
- MATEKG474HELI.config
Tips
- There are silicon grommets for vibration damping. Additional damping is not must.
- No UART2_Tx(Tx2) breakout on this board.
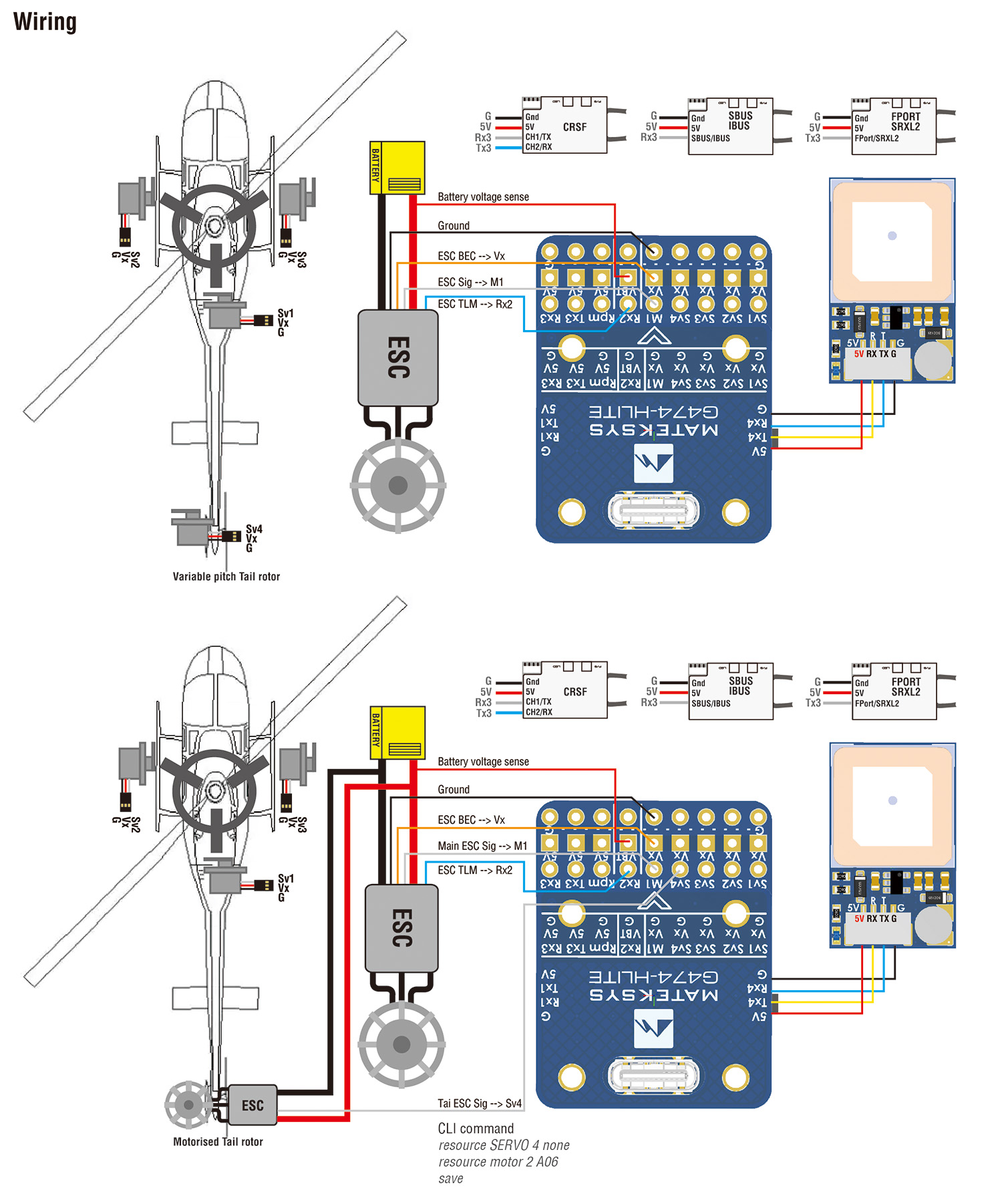
- No “M2” breakout pad on this board, If use it for helicopter with motorised tail rotor, You can remap sv4(servo 4) to M2(motor 2) by CLI command ” resource SERVO 4 none, resource motor 2 A06 “
- No “Curr” breakout pad for external current sensor, You can use “Rx2” as current ADC pin. CLI command ” resource SERIAL_RX 2 none, resource ADC_CURR 1 A03 ” or use “RPM” pin, CLI command ” resource FREQ 1 none, resource ADC_CURR 1 B02 ”
- Due to leakage voltage on MCU I/O, there is floating current readout when no external current sensor connected. You can ” set current_meter = NONE “, or just ignore it.
- If the FC is mounted with arrow facing backward. set gyro_1_sensor_align = CW0FLIP
- Blheli bi-direction Dshot ESC, enabled RPM filter: feature rpm_filter
Layout
Wiring
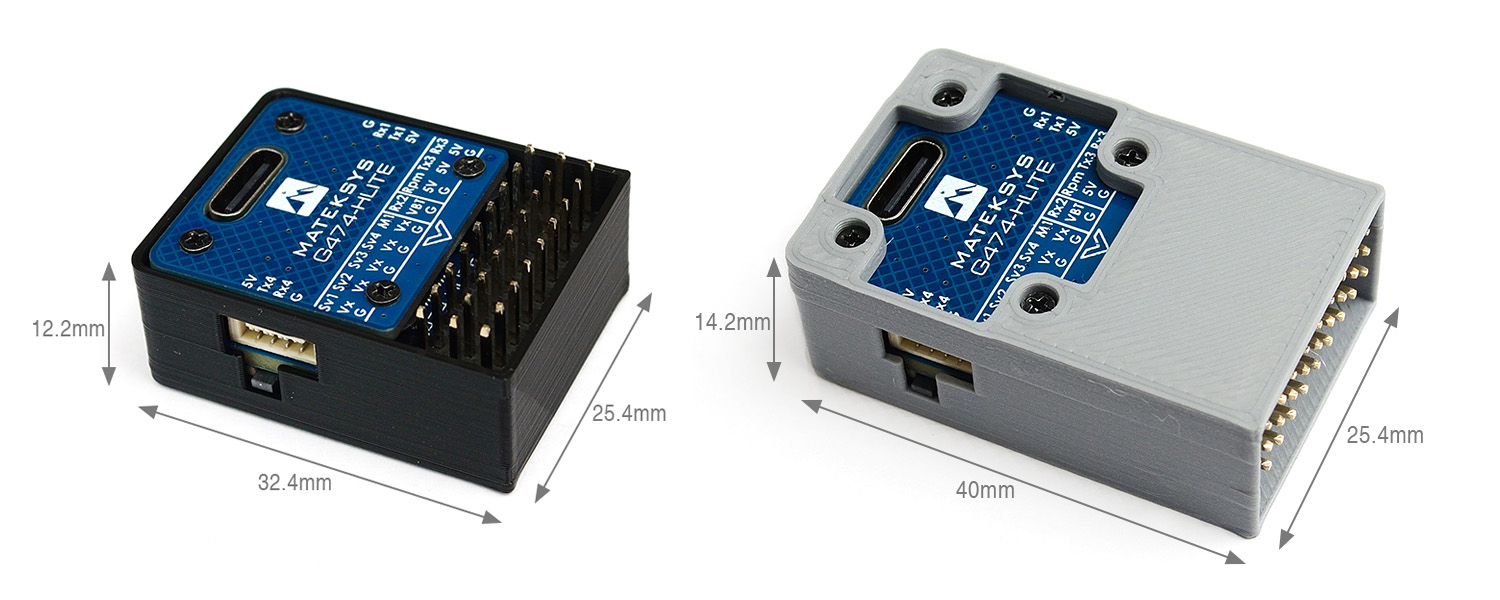
3D Print case
- stl file G474-HLITE_case
Resellers